



1. Narzędzie badawcze
Badanie wymowy przeprowadzono z wykorzystaniem artykulografu AG500, stanowiącego wyposażenie Pracowni Audiofonologicznej w Zakładzie Logopedii i Językoznawstwa Stosowanego UMCS. Urządzenie to pozwala nagrywać, prezentować i oceniać ruchy artykulatorów (warg, języka, żuchwy i podniebienia miękkiego) w obrazie trójwymiarowym w czasie rzeczywistym podczas mówienia. Jego podstawowa funkcja opiera się na pomiarze położenia oznaczonych punktów w przestrzeni w określonym czasie. W skład standardowej wersji urządzenia Articulograph AG500 wchodzą następujące części:
- Jednostka podstawowa zawierająca komputer IDA z oprogramowaniem, które kontroluje przepływ fal magnetycznych emitowanych za pomocą nadajników DTC6 oraz rejestruje dane z odbiornika PSR12. Ten wewnętrzny komputer połączony jest z komputerem zewnętrznym za pomocą kabla internetowego.
- Nadajniki (cewki) DTC6 – kontrolowane przez komputer IDA wytwarzają zmienne pole magnetyczne o określonych częstotliwościach budując kuliste pasmo pomiarowe wewnątrz sześcianu AG500 EMA, do którego są przytwierdzone.
- Odbiornik PSR12 – przechwyca sygnał z 12 sensorów, przekazując go do komputera IDA. W przypadku zapotrzebowania na więcej niż 12 czujników, kolejny dwunastokanałowy odbiornik może być dołączony do systemu.
- Sensory HS220-AG500 – (czujniki HQ220-L165-S) składają się z cewek odbiorczych. Przed wykonaniem badania umieszczane są na artykulatorach pacjenta. Zmienne pole magnetyczne w sześcianie systemu indukuje przepływ prądu zmiennego w czujnikach; jego amplituda jest funkcją odległości cewki odbiorczej od poszczególnych zwojów nadajników. Cewki pełniące funkcję odbiorników umożliwiają pomiar z uwzględnieniem pięciu zmiennych – są nimi wartości położenia w przestrzeni na osiach X, Y, Z oraz dwa kierunki kątowe (phi, theta). Czujniki te są wielokrotnie używane w trakcie pomiarów położenia artykulatorów u różnych mówców. Z uwagi na amortyzację sprzętu, jak również względy higieniczne, powinny być dezynfekowane i wymieniane.
- Sześcian AG500 EMA – stanowi przestrzeń, wewnątrz której znajduje się głowa osoby badanej podczas dokonywania pomiaru (por. Ryc. 1). Położenie sześcianu EMA może być regulowane. W sześcianie EMA wbudowanych jest w odpowiednich pozycjach sześć nadajników generujących zmienne pole magnetyczne.
- Kalibrator AG500 – wałek kalibracyjny używany w celu skalowania danych pochodzących z sensorów.

Ryc. 1. Badany pacjent wewnątrz sześcianu pomiarowego AG500 EMA.
2. Przebieg badań
Przed zaplanowanymi badaniami przeprowadzono kalibrację urządzenia. W tym celu wewnątrz sześcianu umocowano wałek kalibracyjny, do którego przytwierdzono trzy magazynki z uprzednio umieszczonymi w nich sensorami (cztery sensory w każdym magazynku). Następnie przewody sensorów podłączono do jednostki centralnej i uruchomiono program kalibrujący urządzenie. Po zakończeniu procesu kalibracji, sprawdzono jej raport by upewnić się, czy uzyskane parametry wskazują na prawidłowe działanie systemu.
Po stwierdzeniu poprawności kalibracji sensory zostały odłączone od jednostki centralnej i wyjęte z karabinków w celu dalszego przygotowania. Najpierw umieszczono je na 1h w roztworze sterylizującym, a po wyschnięciu powleczono mleczkiem lateksowym.
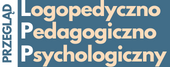
Tak przygotowane sensory umieszczono we wcześniej wybranych punktach ruchomych narządów mowy pacjenta. Do ich przyklejenia użyto nietoksycznego kleju tkankowego Cyano-Veneer ®. Trzy sensory pełniły funkcję umożliwiającą późniejszą korekcję niepożądanych ruchów głowy występujących w trakcie badania i umieszczone zostały na wyrostkach sutkowatych za uszami oraz w zagłębieniu pomiędzy nosem i czołem. Miejsca te wybrano ze względu na brak możliwości przemieszczania się sensorów względem siebie podczas przeprowadzanego badania. Następnie przytwierdzono czujniki kontrolujące ruchy warg. Umiejscowiono je w centralnej osi twarzy, jednak nie na samych wargach, ze względu na ich bardzo delikatną tkankę, która mogłaby być zerwana przy odklejaniu sensorów, lecz na skórze tuż przy granicy warg. Kolejne cztery sensory umieszczono na środkowej osi języka: jeden na czubku, jeden w obszarze postdorsum i dwa w równych odstępach między tymi sensorami skrajnymi (u pacjenta z wymową normatywną użyto trzech sensorów, rozmieszczonych na czubku, środkowej i tylnej części języka). Kolejne dwa sensory przyklejono na bokach górnej powierzchni języka między pierwszym (czubek) i drugim sensorem (por. Ryc. 1 i 2). Ostatni sensor przyklejono na granicy dolnych siekaczy i dziąseł, w celu kontrolowania ruchów żuchwy.
Ryc. 1. Rozmieszczenie wybranych sensorów rejestrujących pracę ruchomych narządów mowy u pacjenta z wymową normatywną.

Ryc. 2. Rozmieszczenie wybranych sensorów rejestrujących pracę ruchomych narządów mowy u pacjentki z wymową wadliwą.
Jeden sensor służył obrysowaniu kształtu wałka dziąsłowego, podniebienia twardego i częściowo podniebienia miękkiego. Na tej podstawie wyznaczono później schemat wyżej wymienionych narządów mowy. Przyklejanie wszystkich sensorów w jamie ustnej wiązało się z osuszaniem powierzchni, do których je przytwierdzano. W tym celu użyto sterylnych gazików bawełnianych. Przewody znajdujące się w okolicach twarzy przyklejono plastrem do policzków, szyi i czoła aby swoim ciężarem nie ograniczały ruchów artykulatorów.
W ten sposób przygotowane osoby zajmowały miejsce przy jednostce głównej, siadając na krześle tak, aby głowa znajdowała się w centrum sześcianu. Po podłączeniu sensorów do urządzenia i założeniu na rękę klipsa z uziemieniem, osoby były gotowe do badania.
Po kilku nagraniach próbnych, badający używając dodatkowego sensora przytwierdzonego do drewnianej szpatułki wykonywał obrys podniebienia po osi centralnej. Następnie badani mieli za zadanie czytać wyrazy pojawiające się na ekranie umieszczonym przed nimi na wysokości wzroku. Wyrazy pojawiały się co 3 sekundy. Po tak przeprowadzonej sesji nagraniowej przewody odłączano od jednostki głównej i usuwano sensory z ciała osób badanych.
Po każdej sesji importowano uzyskane dane z jednostki głównej artykulografu do komputera sterującego. Tam, przy pomocy programu CalcPos dostarczonego przez producenta sprzętu, przeliczono wartości amplitud uzyskanych z poszczególnych sensorów na dane przestrzenne dla każdego sensora, uwzględniając wcześniej uzyskane dane kalibracyjne. Następnie wykonano korekcję ruchów głowy na podstawie danych uzyskanych z sensorów kontrolnych wykorzystując oprogramowanie również dostarczone przez producenta artykulografu. W ten sposób przygotowane wartości poddano dalszej analizie.

